INTERFACCIAMENTO CON ROBOT CAMERIERI (ROOM SERVICE)
È possibile interfacciare il robot cameriere Keenon con Menu.
Tra le Opzioni installazione - Dispositivi, è presente innanzitutto campo Keenon store id in cui è possibile inserire l'id dello store Keenon che identifica la “stanza” con i diversi robot presenti.
Il robot può essere quindi richiamato da 3 punti configurando un bottone con la funzione Invia robot:
- Da Monitor cucina: il robot scelto per l'invio (primo campo in configurazione bottone), verrà mandato al tavolo/centro di produzione (secondo campo in configurazione bottone), in maniera automatica oppure scegliendolo ogni volta dopo aver cliccato sul bottone (se flaggato il Chiedi).
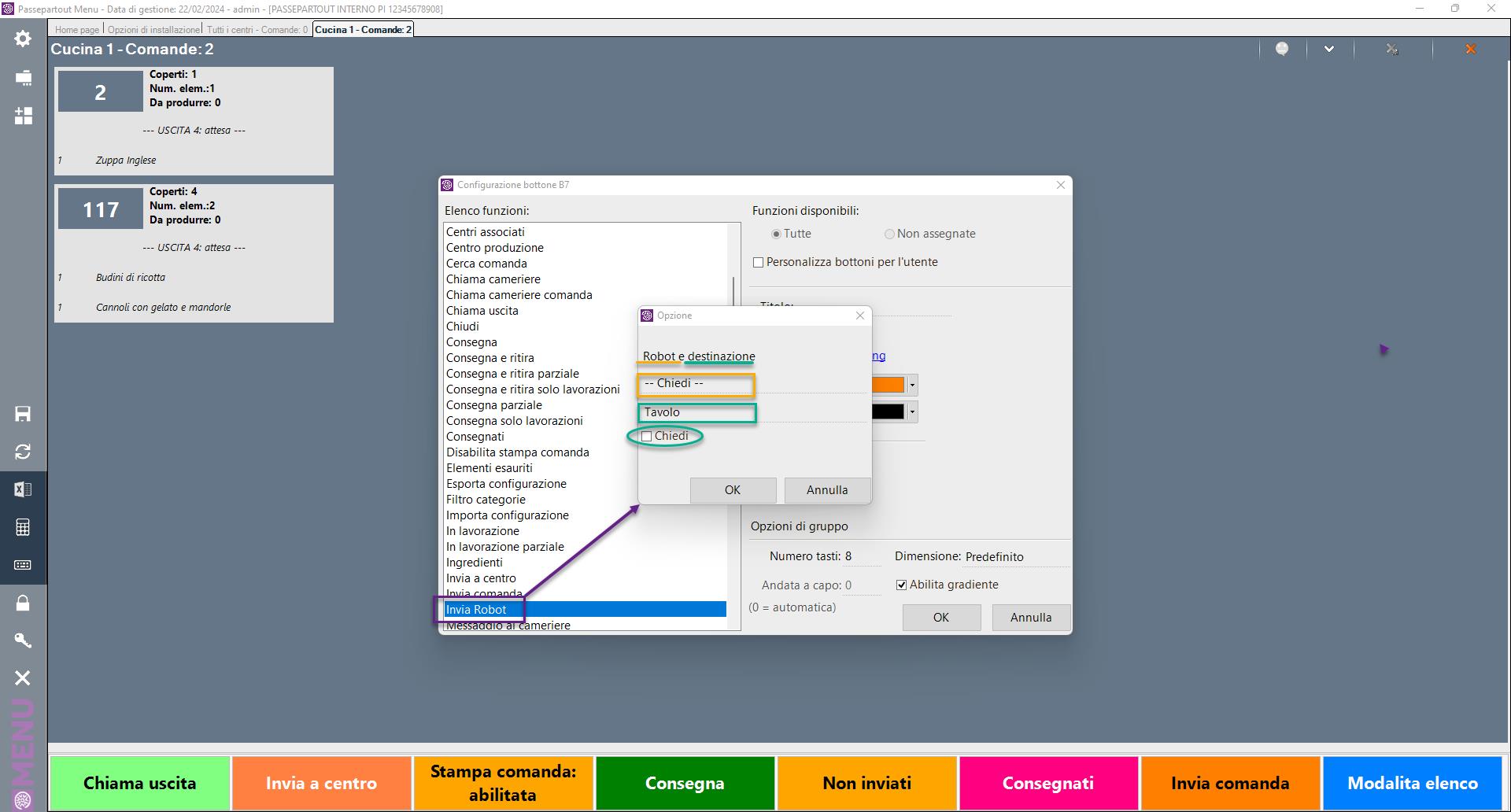
In particolare quindi le destinazioni possono essere:
- Centro di produzione: Se il centro attivo è uno, non "Tutti i centri", il robot verrà automaticamente mandato al centro attivo, in alternativa verrà chiesto a quale centro mandarlo.
- Tavolo: Se la comanda è selezionata, il robot verrà automaticamente mandato al tavolo associato, in alternativa verrà chiesto a quale tavolo mandarlo.
- Chiedi: La destinazione (tavolo/centro di produzione) verrà richiesta ogni volta che l'operazione verrà eseguita.
- Dalla Sala: Il robot scelto per l'invio, verrà inviato al tavolo/centro di produzione scelto dopo aver premuto sul bottone.
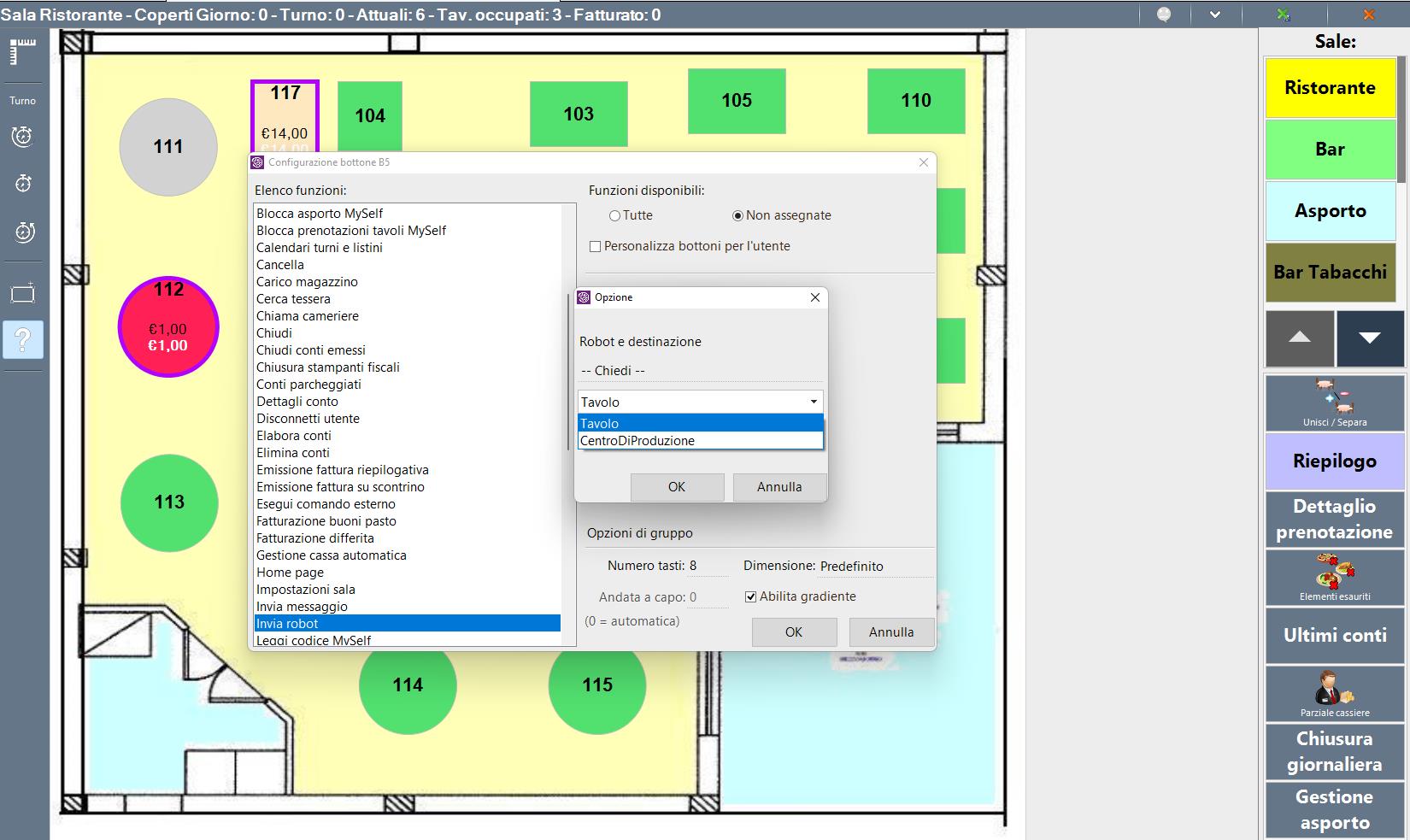
In particolare quindi le destinazioni possono essere:
- Centro di produzione: Verrà aperta la finestra che permetterà di scegliere il centro di produzione nel quale verrà mandato il robot.
- Tavolo: Verrà aperta la finestra interattiva che permetterà di scegliere il tavolo nel quale verrà mandato il robot.
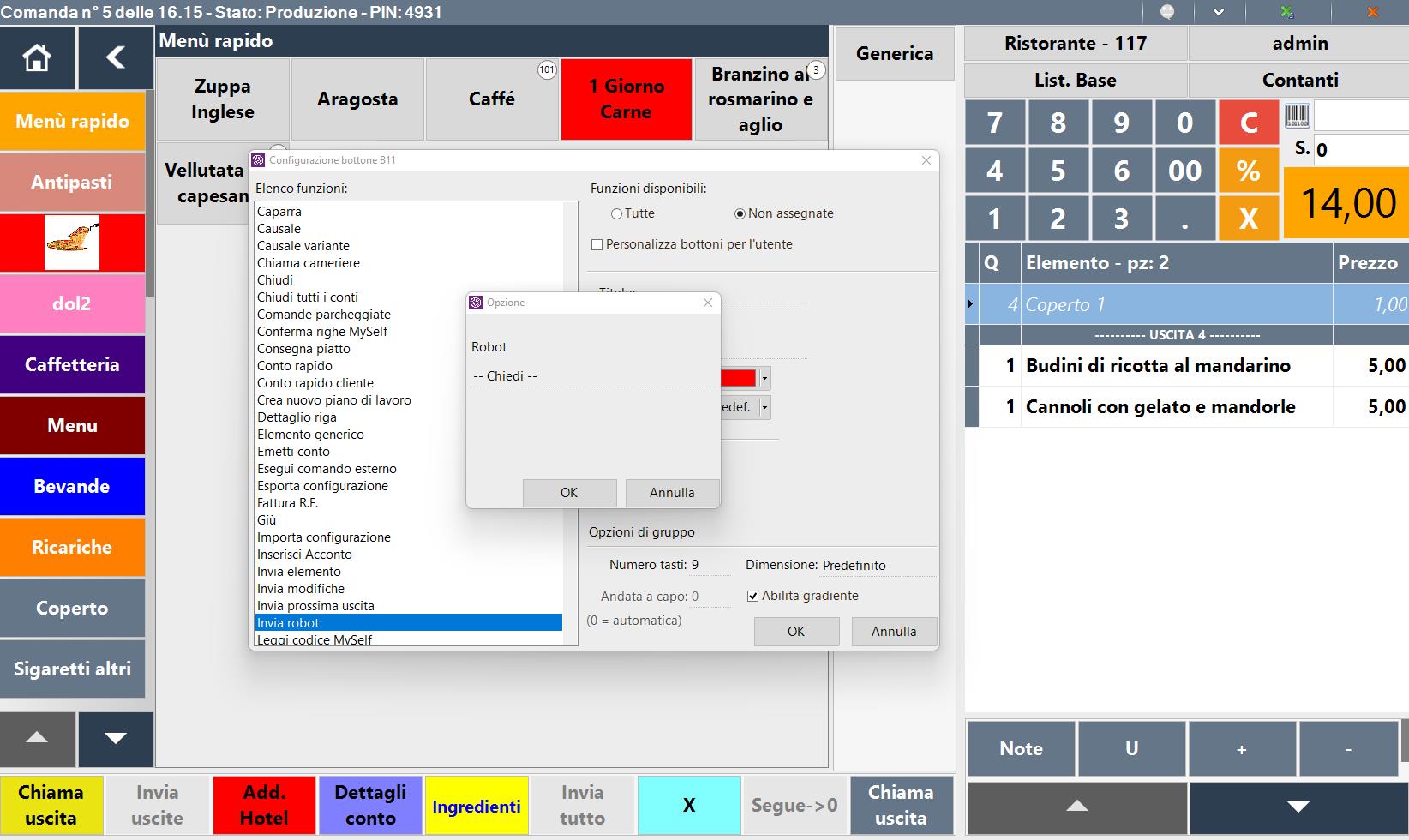
- Comanda: Il robot scelto per l'invio, verrà mandato al tavolo associato alla comanda attiva.
Se impostato su Chiedi, ogni qual volta l'operazione verrà eseguita, il nome del robot verrà chiesto, a meno che non ce ne sia solo uno.
N.B. Affinchè "tavoli"/"centri di comando" vengano correttamente associati tra il gestionale e la mappa del robot, i nomi dei "tavoli"/"centri di produzione" sul gestionale devono corrispondere con i nomi dei punti mappati dal robot.